Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.


 Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.
Dodawaj ogłoszenia, składaj zapytania, promuj swoją Firmę. Jedno konto w systemie vManager pozwala na zarządzanie usługami
na wszystkich portalach Grupy Vertica.pl.






Autor: dr inż. Panasiuk Jarosław, ppłk dr inż. Wojciech Kaczmarek
Wydawnictwo: Wydawnictwo Naukowe PWN
Stron: 281
Data wydania: 2017-11-12
Typ: książka
Druk: tak
Wersja elektroniczna: nie
ISBN:
978-8-30-119725-4
12-11-2017
16.5 x 23.5 cm
nie
nie
nie
Ostatnia z serii książek, przygotowanych przez Wydawnictwo Naukowe PWN z cyklu ROBOTYKA, przekazuje Czytelnikowi nowoczesną i aktualną wiedzę dotyczącej jednej z najbardziej rozwijających się technologii XXI wieku. Podręcznik zatytułowany Programowanie robotów przemysłowych systematyzuje w jednym tomie szeroką, choć trudno dostępną wiedzę z zakresu programowania robotów.
Cała treść książki jest jednym wielkim ciągiem prezentacji przykładów opisujących krok po kroku zagadnienia związane z uruchomieniem, konfiguracją, jak i programowaniem robotów.
W stosunku do istniejących obecnie opracowań czy też artykułów dotyczących programowania robotów, jest to pierwsza pozycja prezentująca te zagadnienia na przykładzie rozwiązań takich firm jak: ABB, FANUC, KUKA i MITSUBISHI. Książka stanowi więc kompendium robotyki, opisujące języki programowania z praktycznymi przykładami.
Książka ze względu na praktyczność i sposób przekazu kierowana jest nie tylko do studentów automatyki i robotyki czy mechatroniki, ale również do praktyków – programistów robotów, integratorów automatyki, inżynierów i wielu innych.
Wprowadzenie
1. Języki programowania a programowanie robotów
1.1. Metody programowania robotów
1.1.1. Metody programowania online
1.1.2. Metody programowania offline
1.1.3. Hybrydowe metody programowania
1.2. Języki programowania robotów
1.2.1. Składnia języków programowania robotów
1.2.2. Strategia i pragmatyka programowania robotów
2. Podstawy teoretyczne programowania robotów
3. Programowanie robotów wybranych firm
3.1. Programowanie robotów firmy ABB
3.1.1. Kontroler IRC5, system RobotWare OS – opcje i parametry systemowe
3.1.2. FlexPendant – panel nauczania robotów firmy ABB
3.1.3. Przed przystąpieniem do programowania robotów firmy ABB – informacje podstawowe
3.1.4. Wybrane elementy języka programowania RAPID
3.1.5. Tworzenie programu dla robotów firmy ABB z wykorzystaniem FlexPendanta i środowiska RobotStudio
3.2. Programowanie robotów firmy FANUC
3.2.1. Kontroler R-30iB
3.2.2. iPendant – panel nauczania robotów firmy FANUC
3.2.3. Przed przystąpieniem do programowania robotów firmy FANUC – informacje dotyczące uruchamiania i konfiguracji systemu zrobotyzowanego
3.2.4. Wybrane elementy instrukcji wykorzystywanych do programowania robotów firmy FANUC
3.2.5. Tworzenie programu dla robotów firmy FANUC z wykorzystaniem Teach Pendant i środowiska Roboguide
3.2.6. Testowanie programu
3.2.7. Kontrolery serii R30iB Plu
3.3. Programowanie robotów firmy Mitsubishi Electric
3.3.1. Kontrolery CR750-Q
3.3.2. Panel nauczania R56TB
3.3.3. Przed przystąpieniem do programowania robotów firmy Mitsubishi Electric – informacje podstawowe
3.3.4. Wybrane elementy języka programowania Melfa-Basic V
3.3.5. Tworzenie programu dla robotów firmy Mitsubishi Electric z wykorzystaniem panelu nauczania i programu RT ToolBox2
3.4. Programowanie robotów firmy KUKA
3.4.1. Kontroler KR C4
3.4.2. SmartPAD – panel nauczania robotów firmy KUKA
3.4.3. Przed przystąpieniem do programowania robotów firmy KUKA – podstawowe informacje
4. Porównanie sposobu sterowania i programowania robotów ABB, FANUC, MITSUBISHI i KUKA
4.1. Metody sterowania robotów
4.2. Wybrane instrukcje programowania robotów
5. Kierunki rozwoju języków programowania robotów
6. Bibliografia
W naszym serwisie możesz złożyć zapytanie do wielu firm.
Zapytanie możesz wysłać bezpośrednio do firmy lub o wybrany produkt a nawet całą kategorię produktów.
Poniżej w kilku krokach pokazujemy jak wysłać zapytanie.

1. Skorzystaj z wyszukiwarki wpisując czego szukasz.
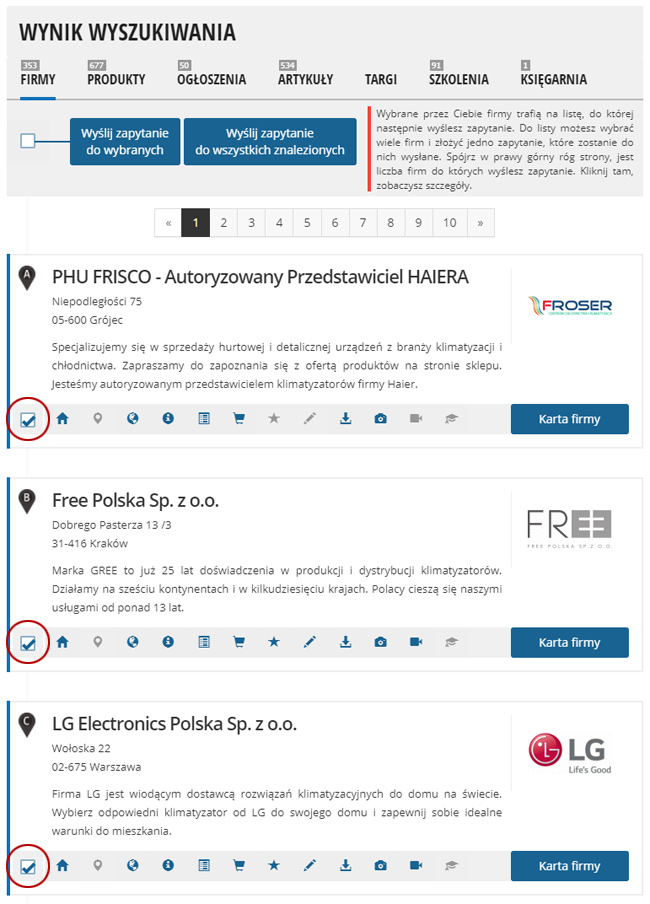
2. Zaznacz na liście wyniku wyszukiwania wybrane pozycje.
Możesz także wejść bezpośrednio do katalogu firm lub katalogu produktów i dokonać wyboru.

3. Twój wybór będzie pokazany w górnym pasku portalu. Najedź myszką i kliknij.
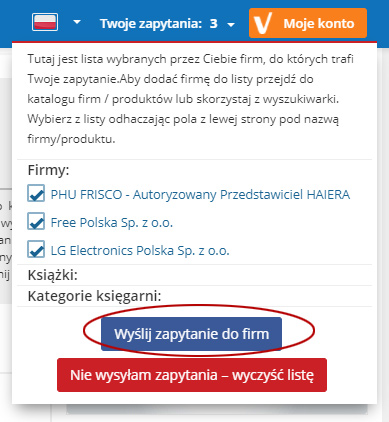
4. Następnie kliknij przycisk „Wyślij zapytanie do firm”.
5. Jeżeli nie jesteś zalogowany to włączy się strona z możliwością wyboru w jaki sposób chcesz korzystać z serwisu.
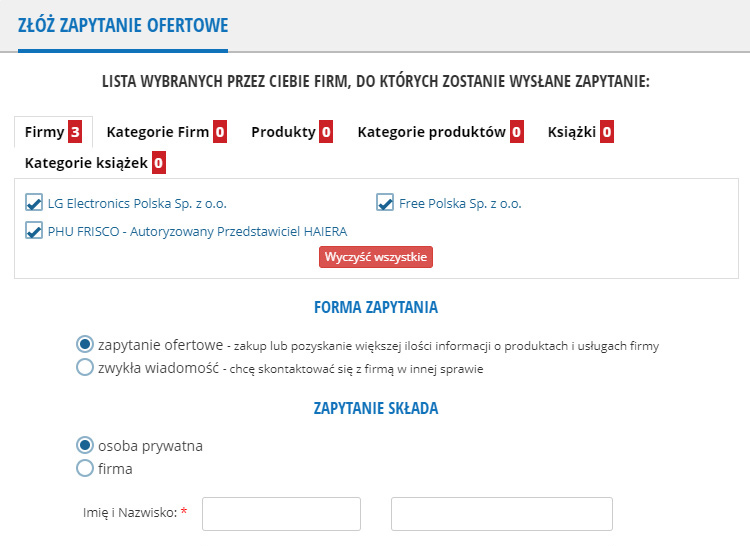
6. Włączy się formularz składania zapytania.
Miejsca, do których składasz zapytania zostały podzielone na zakładki. Na czerwono podświetlone są liczby wybranych firm, produktów itd. Tutaj możesz jeszcze dokonać zmian wyboru.
Wpisz swoje zapytanie, podaj dane kontaktowe i wyślij.
7. My roześlemy Twoje zapytanie do wybranych przez Ciebie firm, a Ty czekaj na odpowiedzi.
8. Chcesz złożyć zapytanie? Kliknij tutaj i wpisz czego szukasz.